太极拳技击中的科学背景分析

一、“三论”与太极拳
三论是系统论、信息论、控制论的简称。
太极拳克敌制胜,用技术语言来说,无非就是设计出一个动态系统,使这个系统满足一定条件,即在有任何外界干扰的情况下它都能保持稳定,并同时能输出一个信号,给干扰源以毁灭性的打击。
不倒翁就是这样一个稳定的动态系统。当你推动它一下后,它仍能恢复到原来的状态,只是不能对推者给以反击作用而已。
无线电收音机也是一种动态系统。它能排除天空中的各种信号干扰,从而进行稳定的播放。如果它出现了啸叫声,我们就说它未能排除杂波干扰,或出现了自激(坏了),成了一个待修理的不稳定的动态系统。因此,完好的无线电收音机对空中的各种杂波干扰也是一个稳定的动态系统。那么,对于练太极拳者也可以看成是一个能排除各种干扰(拳打、脚踢)而保持稳定(平衡不倒)的动态系统。得到不败是制胜的关键。兵法讲:“不败在己,得胜在人”,“要想战胜敌人,首先要把自己立于不败之地”。进而使这个动态系统(练太极拳者)在排除拳打脚踢干扰的同时,立即输出一个给干扰源(进击者)以毁灭性打击的信号(图1)。
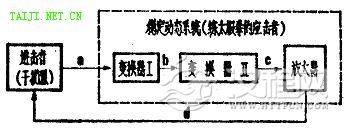
a:进击者(干扰源)对动态系统的作用函数,包括拳打脚踢等对防守者的有害作用(干扰)。
变换器Ⅰ:它把作用函数a转换成对防守者无害的信息,即拳论中所谓的“化劲”、“引进落空”、“避实闪开”等。
b:变换器输出的无害信息。
变换器Ⅱ:它把无害信息 转化成向干扰源(进击者)输出的有害作用 。
放大器:它把作用c放大,以致使干扰源不能再施放干扰——即毁灭。这就是拳论中所谓的“击虚”、“黏劲”、“借力”、“合即出”或“发”。
一个高明的拳师,恰似这样一个动态系统。因为对于高明的拳师来说,对手无论如何进攻,他都能把进攻来的拳脚化开(闪避),使之变成对己无害,而后乘敌之隙给其以毁灭性的打击,从而保持自己的平衡与稳定。
根据现代控制理论,任何动态系统不管是机械的、热力的、电气的,还是经济学或生物学的,都可以用微分方程来描述。对这些微分方程求解,就可以获得系统对输出量(或称作用函数)的响应。这种关于系统动态特性的数学表达式。我们称之谓动态系统的数学模型。它的建立首先要根据物理的、化学的或电学的各种定律进行推导。任何动态系统都是十分复杂的,这就要求抓住它的主要矛盾加以分析,略去其非主要矛盾,并在简化过程中不失去我们感兴趣的主要因素(当然,如果必要的话,我们可以用几十个、甚至几百个微分方程去精确地描述一个系统,而不用简化后的数学模型作近似的描述)。这是本文进行太极拳技击原理研究的主要方法。
根据以上方法,研究中要解决以下两个问题:第一,首先要对拳论的观点进行归纳,并且联系长期以来人们积累的经验,进行定性分析,找出它们中间的正确论点,分析确定它们的物理背景,以及支配实际过程的主要物理学定律;第二,根据这种定律,建立太极拳这个动态系统的数学模型,达到在一定精确度上用数学表达式概括说明前人在拳论中关于太极拳的精辟论述。因此,这是本文下面的两个主要任务。尽管本文给出的数学表达式十分简章和粗糙,但是它把现代科学的研究方法,即“三论”引进到现代拳论研究之中。通过系统分析所建立起来的太极拳应击状态之数学模型,是用现代数学微积分(辩证数学)对拳论进行研究的初探。这个数学模型作为研究分析太极拳这个动态系统已经显示了它的优点。因为在解析这个数学表达式时,逻辑地得到了拳论的主要结论。这也就给太极拳的技击效能建立了数理力学的基础。
二、太极球理论的物理背景
现在我们来对太极球作进一步定性的力学分析,搞清它的物理背景,即设计这一动态系统的理论依据,从而为构造太极球的数学模型作好准备。
(一)倒与不倒的力学原理
一个物体处在平衡状态,要想把它推倒,所用的物理量的大小是用力矩来衡量的。因为要推倒平衡状态下的物体,不但和使用的推力的大小有关,而且和推力的施力点及施力方向有关,即与力矩的大小有关。
例如:一个一米半高,直径0.34米,约一尺的混凝土圆柱,重约500市斤,在推力 作用下把它推倒所需的力 由下式决定(图2):

因此,一百余斤重的人在同样的地点施力推倒他,施力大约 。
从这里可以看出,推倒一个直立的人,并不需要多大的力,好象用手轻轻一推就会倒下。这个结论在实践上是不能被人们接受的,因为实践中要打倒一个人并不是一件轻而易举的事。矛盾出现在哪里呢?为了说明这个道理,我们作如下的分析:
通常,物体所处的状态分为三种:
1.稳定平衡:当物体受外力作用时重心升高;而在外力去掉后又恢复到原有状态。这时,我们就说物体处于稳定平衡状态。如上例,当推力 加在混凝土圆柱上时,如果它的重心的射影点没有越过圆柱的底面,则去掉 时混凝土柱又恢复到原有的直立状态而不会歪倒。因为在施力过程中圆柱的重心在升高,在重心射影点未越过底面之前,混凝土圆柱处于稳定平衡。
2.不稳定平衡:上例当重心射影点处在边缘状态时,它稍稍偏离,重心就会降低,处在一种要倒没倒的状态,我们称这种状态为不稳定平衡。这种状态的重心最高。要想使物体所处状态稳定,重心越低越好。不倒翁就是根据这个原理制成的。
3.随遇平衡:在外力的作用下,如果物体的重心既不升高又不降低,如平面上的球所处的状态,就是随遇平衡状态。随遇平衡的特点是:在球的滚动过程中(相对于平面),它的重心既不升高也不降低,八面玲珑,随遇随平,没有跌倒之说。
太极拳技击锻炼得到球的随遇平衡的机理,就是处于永无失败(不倒。假如以倒为败的话)的妙境。拳论对这一点有精辟的阐述。如李亦畲的五字诀说:“身滞则进退不能自如,故要身灵。”王宗岳的拳论说:“迈步如猫行。”有再大的桩劲,也不如立埋的混凝土电线杆子,可是电线杆子也有被车撞倒的,但谁也没听说过球被人踢了一个跟斗的。只要有倒的可能,就能造成倒的条件。球无倒的可能,任你如何进击,也造不成倒的条件。所以,把太极比做一个球,其道理就在于此。
物体按其本性来分,又可分成刚体和柔体(弹性体)。
刚体:在外力作用下,形状不变的物体称为刚体。如上例中的混凝土圆柱,其特点是施力于其上任意一点,必牵动其重心。
柔体(弹性体):在外力作用下物体的形状可以改变,而施力去掉后又恢复其原形状的物体称之为柔体(弹性体)。
人体在一般状态下就是一个弹性体。下面我们举一个化简的例子,看一看柔体(弹性体)在施力状态下的情况。
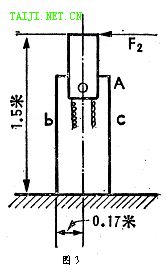
图3同样是一个混凝土圆柱,只是加了一个中间铰链 。在施力 作用下,只能推歪了上半段。 的力再大,也不能将柱子推倒。当施力 去掉后,弹簧 、 又将上半段拉回到原有状态。人体是一个具有周身转动关节的弹性体(指一般状态下),在立正状态时双脚的支撑面积小于一尺直径的水泥柱,但很难被推倒就是这个道理。反之,如果人处于一种僵硬的状态,失去应有的弹性,就很容易被推倒。初习拳路的人经常听到老师讲“身体要放松,不要使僵劲”,就是这个道理。
(二)太极球数学模型的物理背景
基于以上两点分析,我们回答了第一个基本问题,因此这里已经可以直观地、定性地描述或建立了太极拳技击制胜的模型。
前面说过,从“三论”的角度来看,太极拳技击制胜无非就是设计这样一个动态系统:使它不但能排除拳打脚踢的外来干扰保持稳定不倒,而且能对干扰源输出一个毁灭性的信息(打击)。现在看来它应是一个轻灵转动的(浮在水面或空中的)弹力球——一个稳定的动态系统。我们已称之谓太极球。
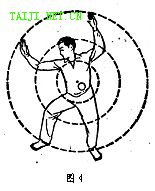
通过对太极图的分析解释,这个太极球从直观上不难想象,如图4所示,它是以位于应击者腰部的人体质心 为圈心的球,球面看去无形其实有形,分为三层,分别是手、肘、身体在空间与圈心 等距某点的活动轨迹(球面)。而且这些球面又随关节转动可伸可缩(屈),形成了三个弹性球面,可将它们称为手圈、肘圈和身圈。
根据上面的讨论,显然,应击者在对抗中如果技术上成功地使自身保持太极球的态势,便将处于无隙可乘的随遇平衡状态之中。而且,从前面的分析我们又知道,这个太极球是一个力场或势场,它是威胁进击者的一种存在。所以综合以上这些分析,便得到我们设计的太极球这样一个动态系统,这个系统的数学表达式就是它——太极球的数学模型。这个模型我们将在另文太极拳的数理分析中给出并对它进行专门的讨论。
三论是系统论、信息论、控制论的简称。
太极拳克敌制胜,用技术语言来说,无非就是设计出一个动态系统,使这个系统满足一定条件,即在有任何外界干扰的情况下它都能保持稳定,并同时能输出一个信号,给干扰源以毁灭性的打击。
不倒翁就是这样一个稳定的动态系统。当你推动它一下后,它仍能恢复到原来的状态,只是不能对推者给以反击作用而已。
无线电收音机也是一种动态系统。它能排除天空中的各种信号干扰,从而进行稳定的播放。如果它出现了啸叫声,我们就说它未能排除杂波干扰,或出现了自激(坏了),成了一个待修理的不稳定的动态系统。因此,完好的无线电收音机对空中的各种杂波干扰也是一个稳定的动态系统。那么,对于练太极拳者也可以看成是一个能排除各种干扰(拳打、脚踢)而保持稳定(平衡不倒)的动态系统。得到不败是制胜的关键。兵法讲:“不败在己,得胜在人”,“要想战胜敌人,首先要把自己立于不败之地”。进而使这个动态系统(练太极拳者)在排除拳打脚踢干扰的同时,立即输出一个给干扰源(进击者)以毁灭性打击的信号(图1)。

a:进击者(干扰源)对动态系统的作用函数,包括拳打脚踢等对防守者的有害作用(干扰)。
变换器Ⅰ:它把作用函数a转换成对防守者无害的信息,即拳论中所谓的“化劲”、“引进落空”、“避实闪开”等。
b:变换器输出的无害信息。
变换器Ⅱ:它把无害信息 转化成向干扰源(进击者)输出的有害作用 。
放大器:它把作用c放大,以致使干扰源不能再施放干扰——即毁灭。这就是拳论中所谓的“击虚”、“黏劲”、“借力”、“合即出”或“发”。
一个高明的拳师,恰似这样一个动态系统。因为对于高明的拳师来说,对手无论如何进攻,他都能把进攻来的拳脚化开(闪避),使之变成对己无害,而后乘敌之隙给其以毁灭性的打击,从而保持自己的平衡与稳定。
根据现代控制理论,任何动态系统不管是机械的、热力的、电气的,还是经济学或生物学的,都可以用微分方程来描述。对这些微分方程求解,就可以获得系统对输出量(或称作用函数)的响应。这种关于系统动态特性的数学表达式。我们称之谓动态系统的数学模型。它的建立首先要根据物理的、化学的或电学的各种定律进行推导。任何动态系统都是十分复杂的,这就要求抓住它的主要矛盾加以分析,略去其非主要矛盾,并在简化过程中不失去我们感兴趣的主要因素(当然,如果必要的话,我们可以用几十个、甚至几百个微分方程去精确地描述一个系统,而不用简化后的数学模型作近似的描述)。这是本文进行太极拳技击原理研究的主要方法。
根据以上方法,研究中要解决以下两个问题:第一,首先要对拳论的观点进行归纳,并且联系长期以来人们积累的经验,进行定性分析,找出它们中间的正确论点,分析确定它们的物理背景,以及支配实际过程的主要物理学定律;第二,根据这种定律,建立太极拳这个动态系统的数学模型,达到在一定精确度上用数学表达式概括说明前人在拳论中关于太极拳的精辟论述。因此,这是本文下面的两个主要任务。尽管本文给出的数学表达式十分简章和粗糙,但是它把现代科学的研究方法,即“三论”引进到现代拳论研究之中。通过系统分析所建立起来的太极拳应击状态之数学模型,是用现代数学微积分(辩证数学)对拳论进行研究的初探。这个数学模型作为研究分析太极拳这个动态系统已经显示了它的优点。因为在解析这个数学表达式时,逻辑地得到了拳论的主要结论。这也就给太极拳的技击效能建立了数理力学的基础。
二、太极球理论的物理背景
现在我们来对太极球作进一步定性的力学分析,搞清它的物理背景,即设计这一动态系统的理论依据,从而为构造太极球的数学模型作好准备。
(一)倒与不倒的力学原理
一个物体处在平衡状态,要想把它推倒,所用的物理量的大小是用力矩来衡量的。因为要推倒平衡状态下的物体,不但和使用的推力的大小有关,而且和推力的施力点及施力方向有关,即与力矩的大小有关。
例如:一个一米半高,直径0.34米,约一尺的混凝土圆柱,重约500市斤,在推力 作用下把它推倒所需的力 由下式决定(图2):

因此,一百余斤重的人在同样的地点施力推倒他,施力大约 。
从这里可以看出,推倒一个直立的人,并不需要多大的力,好象用手轻轻一推就会倒下。这个结论在实践上是不能被人们接受的,因为实践中要打倒一个人并不是一件轻而易举的事。矛盾出现在哪里呢?为了说明这个道理,我们作如下的分析:
通常,物体所处的状态分为三种:
1.稳定平衡:当物体受外力作用时重心升高;而在外力去掉后又恢复到原有状态。这时,我们就说物体处于稳定平衡状态。如上例,当推力 加在混凝土圆柱上时,如果它的重心的射影点没有越过圆柱的底面,则去掉 时混凝土柱又恢复到原有的直立状态而不会歪倒。因为在施力过程中圆柱的重心在升高,在重心射影点未越过底面之前,混凝土圆柱处于稳定平衡。
2.不稳定平衡:上例当重心射影点处在边缘状态时,它稍稍偏离,重心就会降低,处在一种要倒没倒的状态,我们称这种状态为不稳定平衡。这种状态的重心最高。要想使物体所处状态稳定,重心越低越好。不倒翁就是根据这个原理制成的。
3.随遇平衡:在外力的作用下,如果物体的重心既不升高又不降低,如平面上的球所处的状态,就是随遇平衡状态。随遇平衡的特点是:在球的滚动过程中(相对于平面),它的重心既不升高也不降低,八面玲珑,随遇随平,没有跌倒之说。
太极拳技击锻炼得到球的随遇平衡的机理,就是处于永无失败(不倒。假如以倒为败的话)的妙境。拳论对这一点有精辟的阐述。如李亦畲的五字诀说:“身滞则进退不能自如,故要身灵。”王宗岳的拳论说:“迈步如猫行。”有再大的桩劲,也不如立埋的混凝土电线杆子,可是电线杆子也有被车撞倒的,但谁也没听说过球被人踢了一个跟斗的。只要有倒的可能,就能造成倒的条件。球无倒的可能,任你如何进击,也造不成倒的条件。所以,把太极比做一个球,其道理就在于此。
物体按其本性来分,又可分成刚体和柔体(弹性体)。
刚体:在外力作用下,形状不变的物体称为刚体。如上例中的混凝土圆柱,其特点是施力于其上任意一点,必牵动其重心。
柔体(弹性体):在外力作用下物体的形状可以改变,而施力去掉后又恢复其原形状的物体称之为柔体(弹性体)。
人体在一般状态下就是一个弹性体。下面我们举一个化简的例子,看一看柔体(弹性体)在施力状态下的情况。
图3同样是一个混凝土圆柱,只是加了一个中间铰链 。在施力 作用下,只能推歪了上半段。 的力再大,也不能将柱子推倒。当施力 去掉后,弹簧 、 又将上半段拉回到原有状态。人体是一个具有周身转动关节的弹性体(指一般状态下),在立正状态时双脚的支撑面积小于一尺直径的水泥柱,但很难被推倒就是这个道理。反之,如果人处于一种僵硬的状态,失去应有的弹性,就很容易被推倒。初习拳路的人经常听到老师讲“身体要放松,不要使僵劲”,就是这个道理。

(二)太极球数学模型的物理背景
基于以上两点分析,我们回答了第一个基本问题,因此这里已经可以直观地、定性地描述或建立了太极拳技击制胜的模型。
前面说过,从“三论”的角度来看,太极拳技击制胜无非就是设计这样一个动态系统:使它不但能排除拳打脚踢的外来干扰保持稳定不倒,而且能对干扰源输出一个毁灭性的信息(打击)。现在看来它应是一个轻灵转动的(浮在水面或空中的)弹力球——一个稳定的动态系统。我们已称之谓太极球。
通过对太极图的分析解释,这个太极球从直观上不难想象,如图4所示,它是以位于应击者腰部的人体质心 为圈心的球,球面看去无形其实有形,分为三层,分别是手、肘、身体在空间与圈心 等距某点的活动轨迹(球面)。而且这些球面又随关节转动可伸可缩(屈),形成了三个弹性球面,可将它们称为手圈、肘圈和身圈。
根据上面的讨论,显然,应击者在对抗中如果技术上成功地使自身保持太极球的态势,便将处于无隙可乘的随遇平衡状态之中。而且,从前面的分析我们又知道,这个太极球是一个力场或势场,它是威胁进击者的一种存在。所以综合以上这些分析,便得到我们设计的太极球这样一个动态系统,这个系统的数学表达式就是它——太极球的数学模型。这个模型我们将在另文太极拳的数理分析中给出并对它进行专门的讨论。

展开全文
APP阅读